Gabach a écrit :
Te vexes pas Normand, j'ai tout lu et j'en reste pantois

Puis j'ai un penchant pour le métaphysique

Cool, Gabach

T'inquiètes, bien que chébran des sujets techniques, j'ai aussi un penchant certain pour les points de vue de ce roublard de Vincenot (et je n'ai rien contre les truffes!)...

Je te dédie donc ces quelques compléments...

La masse est exprimée en grammes ou kilogrammes. C'est un concept toujours un peu délicat à saisir ; il renvoie plus ou moins à la densité d'un objet.
Le poids est une force, donc s'exprime en Newton (du nom du physicien Isaac Newton ; prononcer nioutonne).
Symbole de cette unité : « N ».
On confond très souvent les deux, ce qui est abusif au plan théorique, mais acceptable en pratique (à peine 2% d'erreur).
L’accélération, exprimée en mètres par seconde par seconde (M/s
2) caractérise la variation de vitesse subie par un objet chaque seconde. Elle peut être positive (prise de vitesse) ou négative (perte de vitesse).
Quelques exemples pour illustrer.
Imaginons qu'un individu, dont la masse vaut 70 kg, se pèse ; la balance va afficher 686,7 N.
Imaginons à présent qu'il se pèse sur la Lune (avec la même balance) et qu'il n'ait ni grossi ni maigri pendant le voyage (ce qui revient à dire que sa masse n'a pas varié) : la balance affichera 113,4 N.
Notre gus pèse donc six fois moins lourd sur la Lune que sur Terre, or sa masse n'a pas changé.
Ceux qui se souviennent des bonds gigantesques effectués par les astronautes de la mission Apollo en 1969 feront le rapprochement...
Autre point : lâchons maintenant, dans un cylindre vertical dans lequel tout l’air a été aspiré, deux objets de masse très différente, par exemple une plume et une bille en acier. Ils vont tomber à la même vitesse, mais leur accélération va être rigoureusement la même, bien que leurs masses soient différentes.
On démontre que masse, accélération et force sont liées par une équation simple communément appelée « principe fondamental de la dynamique ».
Son expression est F = M.g
La force « F » est égale au produit de la masse « M » par l'accélération « g » à laquelle elle est soumise.
Cette affaire-là est de portée universelle : l’accélération de la pesanteur peut être remplacée par n’importe quelle accélération. Une masse soumise à cette accélération quelconque “produira” une force d’une intensité elle aussi quelconque.
Dans le cas de nos moteurs, les bases du raisonnement sont évidemment identiques et transposables : on connaît les masses des pièces en mouvement, on peut calculer les vitesses en résolvant des équations trigonométriques (en fait, on résout des problèmes d'angles et de longueurs de côtés dans différents triangles) propres au système bielle/manivelle que constitue l'embiellage, puis déterminer par ce que l'on appelle le calcul numérique, les variations de ces vitesses, donc obtenir les accélérations qui permettent de déterminer les forces en jeu.
Les ressources de l'informatique permettant plus facilement de visualiser les choses, regardons un peu plus concrètement comment ça se passe.
Pour ce faire, on réalise un zoom d'une partie de mon graphe des vitesses.
Je passe sur la cuisine mathématique et informatique qui permet d’obtenir ce graphe ; le principe est de déterminer quel est, en centièmes de millimètres, le déplacement du piston pour une rotation du vilebrequin, toujours la même et que j’ai fixée, pour obtenir une précision de calcul suffisante et un graphe propre, à un dixième de degré d’angle.
Il suffit ensuite de faire tourner “virtuellement” le vilebrequin à la vitesse voulue pour obtenir la vitesse instantanée du piston.
Le lien entre vitesse et accélération peut donc être, dans un premier temps, mis en valeur de manière assez intuitive.
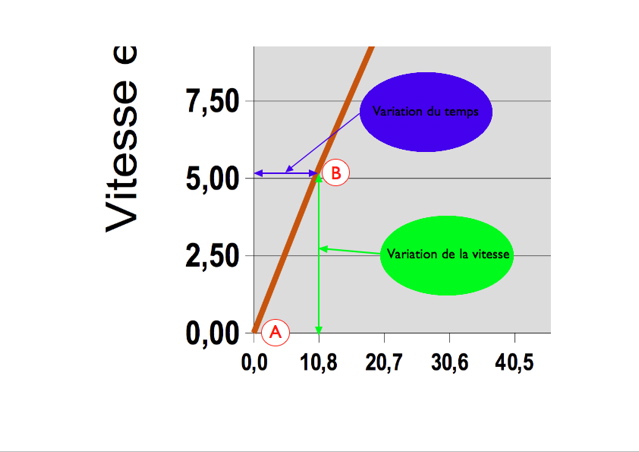
Lorsque le piston est au PMH, sa vitesse est, durant un instant, nulle. Dès qu’il amorce sa descente, il accélère. Le zoom du graphe montre que la variation de vitesse (en vert) rapportée à la variation du temps (en violet) est maximale aux alentours du PMH.
La détermination de la pente de la droite A B est le cœur du calcul numérique : en maths, on appelle ça la dérivation. En dérivant la courbe des vitesses, on obtient l’accélération, qui n’est autre que la variation de vitesse instantanée.
On constate, bien que la vitesse soit encore très faible, qu’elle augmente à ce moment très rapidement. C’est en déterminant de combien elle aurait augmenté durant une seconde qu’on peut annoncer des vitesses de piston de plusieurs milliers de kilomètres par heure. En fait, mathématiquement, cela revient à prolonger la droite A B pendant une durée d’une seconde alors qu’elle n’est physiquement calculée par mon tableur que sur un pas de temps de l’ordre du millième de seconde (un calcul numérique “propre” fait tendre ce pas de temps vers 0...).
L’accélération étant colossale, la force d’inertie développée par l’ensemble bielle/piston l’est également (F=m.g)
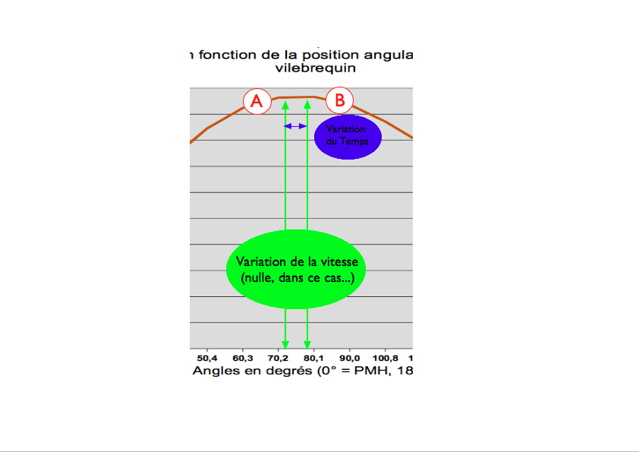
Le second cas de figure est en principe plus facile à comprendre : la vitesse de piston n’augmente pas indéfiniment. Elle passe par un maximum, puis recommence à diminuer mais, pendant un très court instant, ne varie pas.
L’accélération est nulle durant un instant.
C’est ce que montre la seconde planche : la vitesse maximale correspond à une accélération nulle. Au delà de ce point, le piston amorce son freinage : l’accélération change de signe (elle devient négative).
Mathématiquement, notre droite des variations des vitesses est horizontale. Sa pente (l’accélération) est donc devenue nulle.
La force d’inertie développée par l’ensemble bielle/piston est également devenue nulle.
J’espère avoir été suffisamment explicite...
A+