J’ai continué à creuser les vidéos mises en ligne par Volta ; vu que, de toutes façons, je voulais approfondir ces questions, mon niveau en la matière étant lamentable, c’était l’occasion rêvée d’en faire profiter la communauté…

Du coup, je me suis rendu compte que certains points de ma dernière inter étaient erronés, limite faux…
J’ai donc fait du ménage dans le texte concerné, on trouve suffisamment d’inepties sur le Net comme ça, inutile d’en rajouter !

En premier lieu, un rapport cyclique d’ouverture (ou modulation de largeur d’impulsion) n’est qu’un aspect particulier de la détermination des tension et intensité efficaces d’un courant électrique. L’affaire consiste à déterminer, pour l’étude d’un courant périodique quelconque, quel serait le courant continu produisant le même travail durant un temps donné.
La définition des tension et intensité efficaces d’un courant électrique est la suivante :
c’est l’intensité que devrait avoir un courant continu pour dégager dans une résistance purement ohmique (pas de capacité ni d’inductance) la même quantité de chaleur que le courant alternatif.
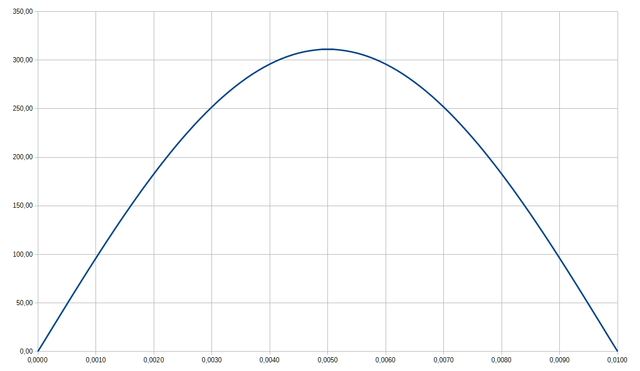
Le graphe ci-dessous montre la courbe représentant la tension positive d’un courant alternatif de 50 Hz de 220 volts (courant du secteur). En abscisses, le temps, en ordonnées, les tensions.
On constate qu’en crête, la tension n’est pas de 220 mais de 313,13 volts.
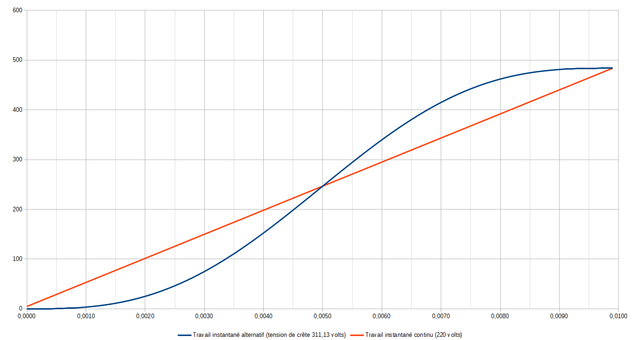
Si on représente, sur l’intervalle de temps considéré, le travail fourni par ce courant alternatif sinusoïdal et un courant continu de 220 volts conformément à la définition rappelée supra, on obtient ceci :
Je passe sur les détails mathématiques des courbes : il faut simplement en retenir qu’à la fin de la période, le dégagement de chaleur dans un circuit purement ohmique aurait effectivement atteint la même valeur pour les deux courants.
Si, maintenant, on s’intéresse à un courant généré de manière purement numérique par un microcontrôleur, on obtient ceci :
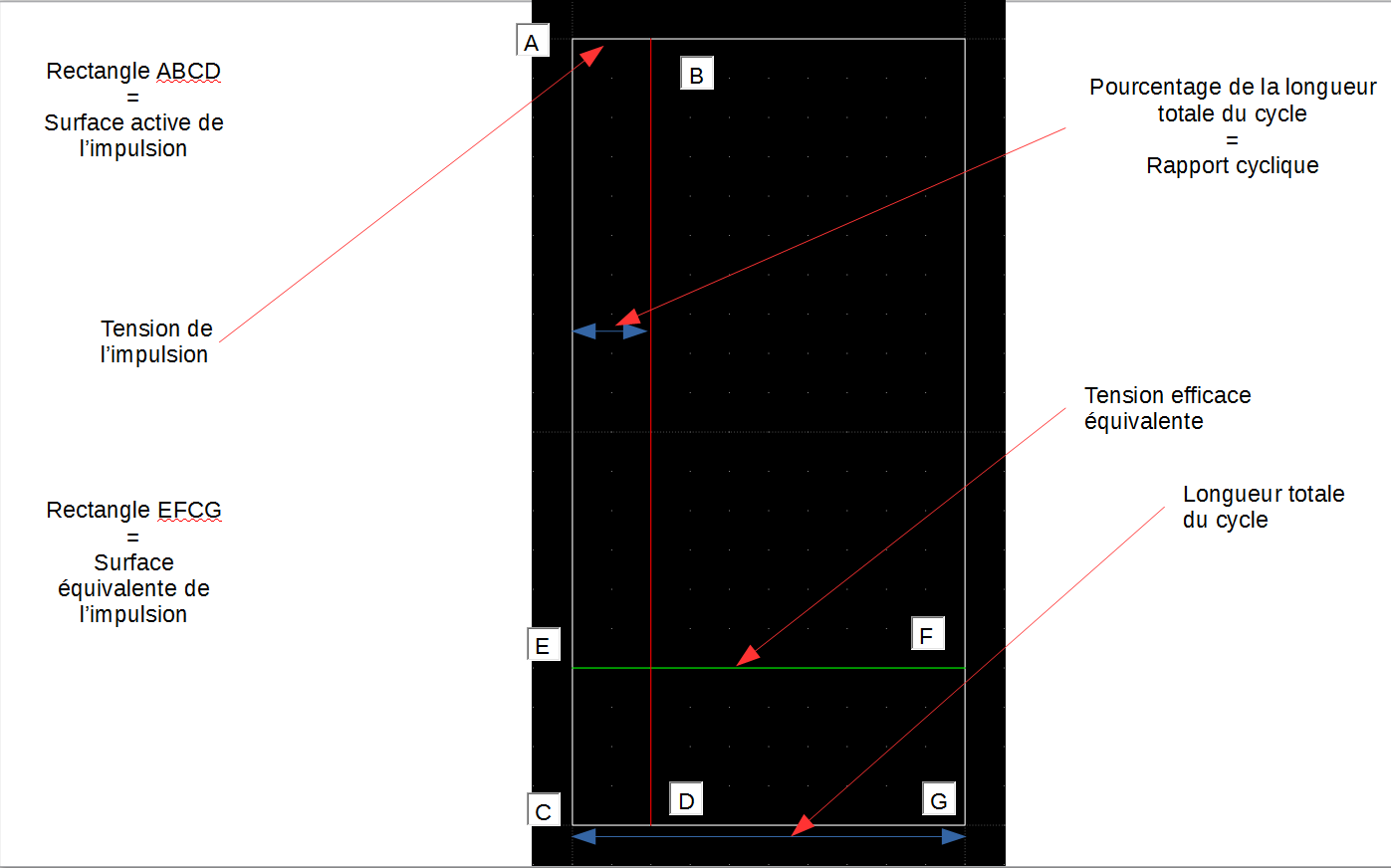
On constate que le microcontrôleur délivre une tension dite « en créneau » dont la valeur passe instantanément de 0 à 5 volts (c’est généralement la tension de service des circuits numériques) selon un pas de temps constant.
C’est un signal « rectangle » dont la fréquence de base est constante : il est représenté par le rectangle ABCD.
Entre les points D et G, la tension est nulle, mais le cycle complet s’étend de C à G. Cet intervalle de temps détermine bien la période du signal, autrement dit sa fréquence.
La question est donc de savoir quelle serait la tension continue qui produirait le même effet si elle s’étendait cette fois sur le cycle complet.
La tension que l’on recherche est représentée par le segment EF.
Il suffit d’appliquer le même raisonnement que précédemment et on passe de la courbe « numérique » découlant du rapport cyclique à une succession de tensions horizontales formant un escalier.
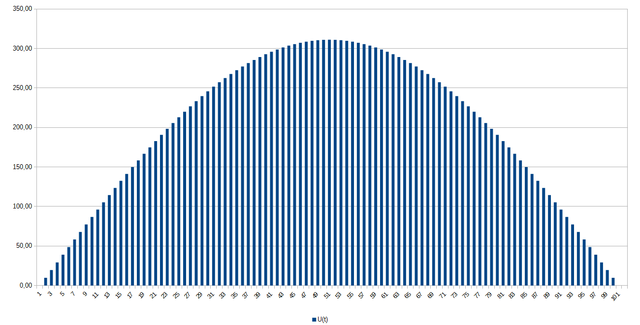
Si on reprend l’exemple du courant « EDF », on obtient ceci :
En abscisses, on retrouve les intervalles de temps : ils sont tous identiques et dépendent de la fréquence de base.
En ordonnées, on retrouve la tension. Chaque intervalle de temps est un rectangle dont la taille reflète exactement le rapport cyclique d’ouverture (également appelé modulation de largeur d’impulsions) délivré par le µ-contrôleur.
Attention : ces rectangles sont en réalité tous jointifs. Le logiciel que j’ai utilisé les centre sur les intervalles pour agrémenter la présentation mais « électriquement », chaque tension règne bien sur l’ensemble de l’impulsion (segment CD sur le graphe précédent).
Le mécanisme est général et fonctionne dans les deux sens (du numérique vers l’analogique et de l’analogique vers le numérique). Dans notre cas, cela revient à numériser une grandeur analogique continue en la réduisant en un nombre fini de tensions constantes sur un intervalle de temps dont la longueur est fixée.
Dans l’exemple, la demie période, qui dure 20 millisecondes, a été décomposée en 100 segments.
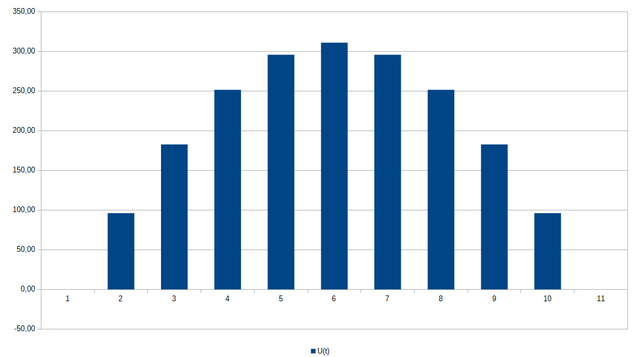
On constate que plus la fréquence est élevée, plus on se rapproche du signal analogique réel car plus l’échantillonnage est précis. A l’inverse, voici ce que ça donne si on divise la fréquence par 10 :
Chaque échelon de courant reste constant pendant un laps de temps beaucoup plus élevé, la numérisation s’éloigne fortement du signal initial : plus la fréquence est faible, plus la représentation du signal réel se dégrade.
Quelques subtilités m’ayant échappé en visionnant la vidéo dédiée j’ai, pour bien comprendre le détail des phénomènes à l’œuvre, reconstitué le signal de commande qui a été utilisé pour actionner le moteur de pilotage de la géométrie variable du turbo. Le signal de base était probablement sinusoïdal (ou triangulaire) et deux fréquences au moins ont été utilisées.
Dans la modélisation, j’ai uniquement considéré des tensions positives, mais cela ne change rien au raisonnement. J’ai conservé la même tension de crête et j’ai changé les fréquences, l’une étant dix fois plus rapide que l’autre.
Dans les deux cas, la loi de variation du rapport cyclique est inchangée et c’est ça l’astuce qui m’a échappé au début : ici, j’ai opté, de manière tout à fait arbitraire, pour un rapport cyclique de l’impulsion n égal à celui de n-1 + 10 %.
Jusqu’à ce que l’on ait atteint la tension de crête, point à partir duquel on retire 10 % à chaque impulsion. Et ainsi de suite.
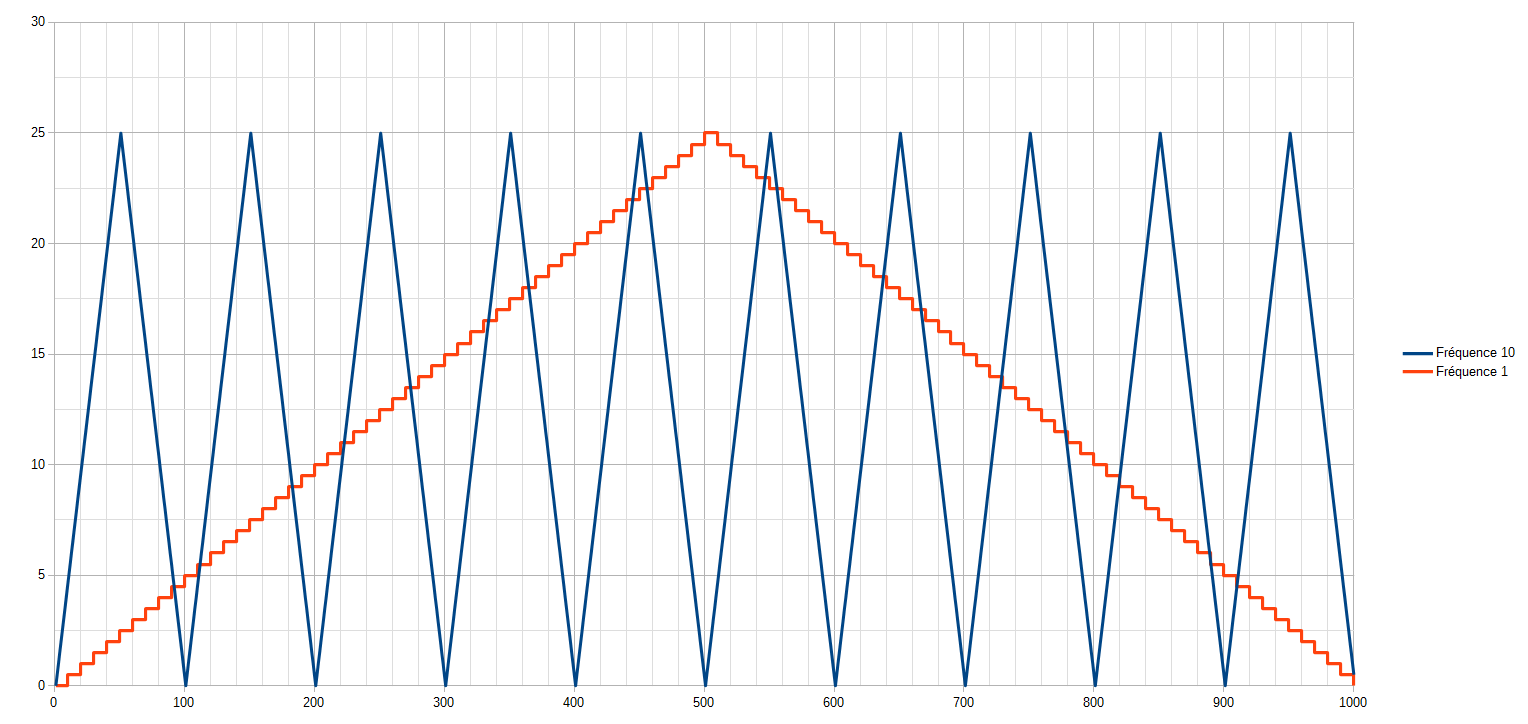
On obtient les signaux suivants :
La courbe rouge s’apparente à celle utilisée dans la première partie de la vidéo, celle où l’actuateur se déplaçait lentement entre ses butées. La courbe bleue correspond à la seconde partie, caractérisée par une vitesse de déplacement de l’actuateur beaucoup plus rapide.
On tire de ce graphe plusieurs conclusions :
- la fréquence de base doit être déterminée en fonction de la qualité du signal qu’on recherche ; dans l’exemple, on voit que le signal lent a toujours un caractère « en escalier » marqué ;
elle doit également tenir compte de la pulsation qu’on veut imposer à l’organe piloté.
Noter enfin qu’il serait très simple d’obtenir un signal d’une fréquence égale à celle de la courbe rouge en jouant sur la variation du rapport cyclique. En l’espèce, il suffirait de passer de 10 à 1 % de variation par impulsion…
On peut donc en conclure que plus la fréquence est élevée, plus les possibilités sont étendues en termes de qualité du signal donc en finesse de pilotage des actuateurs.
On en conclut également et de manière certaine que la fréquence de base est définie une fois pour toutes et qu’elle ne change pas en fonction du temps ou des paramètres d’état du moteur. Pour en revenir à notre questionnement du début avec Bisnouk sur la présence d’un offset (décalage positif de la tension par rapport à 0) dans les commandes d’EGR et de turbo, on peut à présent conclure, là encore de manière certaine, que la grandeur restituée par l’outil de diag embarqué correspondait exactement au RCO déterminé à cet instant par le µ-contrôleur et que ce paramètre restitue correctement le travail de l’ECU.
À ce stade, une nouvelle question vient : quel circuit électronique permet de passer de passer du rectangle ABCD au rectange EFCD ?
J’ai tenté quelques calculs avec un simple condensateur de lissage ; les résultats ne se sont pas avérés concluants. J’ai alors repris l’exercice en introduisant une inductance et une capacité montée en parallèle.
Un circuit LC, en somme.
Là, c’est nettement mieux !
Le principe de fonctionnement est le suivant :
- en A, la tension s’établit brutalement (le front montant est quasiment vertical). La bobine s’oppose à l’établissement du courant pendant court un instant, fonction de son inductance (application de la loi de Lenz) ;
ensuite, le courant s’établit vraiment et la bobine se comporte alors comme une simple résistance ;
le courant circulant, le condensateur peut se charger. À cet instant, la tension à ses bornes est toujours nulle si on le suppose entièrement déchargé ;
le condensateur continuant à se charger, la tension à ses bornes augmente ;
puis le µ-contrôleur interrompt la tension (point B). De nouveau, la bobine va s’opposer à l’arrêt du courant et le prolonger pendant un instant. Le condensateur continue encore à se charger ;
le courant aux bornes d’entrée du circuit étant devenu nul, le condensateur se décharge dans le circuit suivant.
Si la bobine et le condensateur sont judicieusement calculés, l’énergie que contenait l’impulsion a bien été transférée sur la partie du cycle (CG) caractérisée initialement par une tension nulle. On obtient alors l’effet recherché : la courbe EF.
J’ai regardé si un circuit était constitué selon ces principes, à savoir manipulation des modulations de largeur d’impulsions (MLI) puis lissage en sortie.
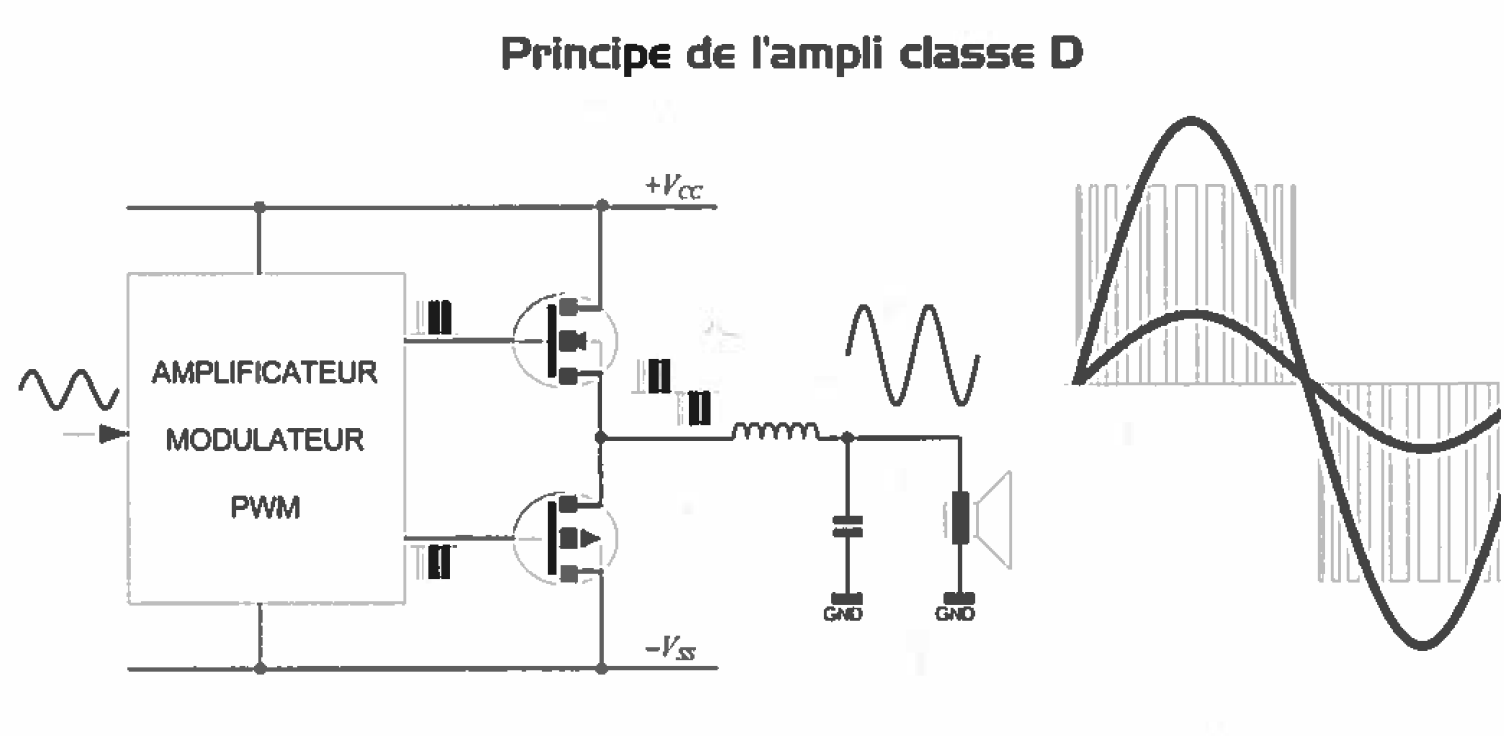
J’en ai trouvé un : l’amplificateur de classe D.
Bien que sa qualité musicale soit un peu en deçà d’un ampli de classe A conventionnel, ce circuit, dont le rendement est très élevé, est utilisé comme ampli dans les appareils mobiles (autoradios et sans doute téléphones). Il est également utilisé pour commander des moteurs, ce qui reviendrait à remplacer, dans le schéma ci-dessus, le haut parleur de sortie par le bobinage du moteur.
Le modulateur PWM (terme anglais désignant la MLI) n’est autre que l’ECU du moteur ; le petit circuit en question transforme donc bien un signal numérique en signal analogique afin qu’il puisse être utilisé par des circuits purement analogiques.
Mais je pense que le circuit situé à l’aval n’est pas encore l’actuateur ; c’est l’ampli opérationnel dont je parlais la semaine dernière.
En effet, si un ampli D peut commander en direct un moteur, la question du pilotage du moteur en question n’est pas encore résolue.
À ce stade, on a transformé le signal numérique délivré par le µ-contrôleur en signal analogique de qualité ; d’un autre côté, on sait qu’il existe un capteur qui nous renseigne sur la position de la soupape d’EGR et sur celle de la tringlerie de commande de géométrie du turbo.
Ces capteurs délivrent une tension.
Le pilotage de ces organes va évidemment consister à comparer leur position réelle à l’instant considéré par rapport à la position théorique calculée par l’ECU.
C’est évidemment le µ-contrôleur qui se charge de ce travail : il traduit la position théorique en un signal et c’est la manière dont ce signal est produit que l’on vient d’examiner.
Si on injecte le signal correspondant à la position théorique et celui correspondant à la position réelle aux bornes d’entrée de l’ampli opé dont je parlais la semaine dernière, on va obtenir un nouveau signal (la différence, amplifiée, entre les deux tensions)
que l’on va pouvoir utiliser pour positionner la soupape d’EGR ou la tringlerie du turbo via une électronique de puissance attaquant, directement cette fois, un moteur électrique.
La réactivité de la commande va dépendre très étroitement du rapport d’amplification de l’ampli opé. Plus celui-ci est élevé, plus la commande d’ajustement va être brutale ; on vient donc d’introduire une nouvelle notion, que je vais tenter de définir ainsi :
la réactivité du système n’est pas définie par le signal numérique issu de la MLI mais par le gain β de l’ampli opé.
Il devient intéressant de faire maintenant le lien avec la partie purement mécanique.
Bisnouk a confirmé l’hypothèse que l’on envisageait au début d’un EGR piloté en contre-réaction. En d’autres termes, le moteur électrique de commande exerce un effort de compression sur un ressort dont la mission est de refermer constamment la soupape.
Ce choix s’explique : en cas de défaillance du système, la soupape doit pouvoir se refermer coûte que coûte. C’est une constante en matière de sécurité ; on pourrait citer l’exemple des systèmes de freinage ferroviaires : contrairement à ce qui se passe en automobile, le système est continuellement sous pression. Pour freiner, on crée une fuite dans le circuit ; en cas de défaillance (perte de pression) le système va se mettre de lui-même en sécurité en déclenchant un freinage d’urgence.
Sur un train, c’est mieux que pas de freins du tout !
Pour le turbo, c’est différent : en cas de défaillance, l’ECU va limiter le volume de gas oil injecté et le régime, donc aucun risque pour le moteur.
L’EGR est donc un organe à part et, à ce titre, il mérite qu’on s’y arrête.
Tout d’abord, contrairement au turbo, il n’est commandé que dans un sens (le turbo ne comporte pas de ressort de rappel). Ensuite, toujours contrairement au turbo, la soupape est en équilibre instable permanent.
Pour comprendre, décrivons le phénomène en comparant divers états.
Soit une pièce, mue par un moteur électrique, qui doit occuper une position linéaire précise. Sa position est donnée par un capteur, un potentiomètre par exemple. On suppose que la tension est de 2 volts. La consigne — qui traduit la position que devrait occuper la pièce — est également donnée par une tension. Supposons cette tension égale à 2 volts.
L’ampli opé, constatant l’égalité des tensions sur ses deux entrées, ne délivre aucun signal en sortie.
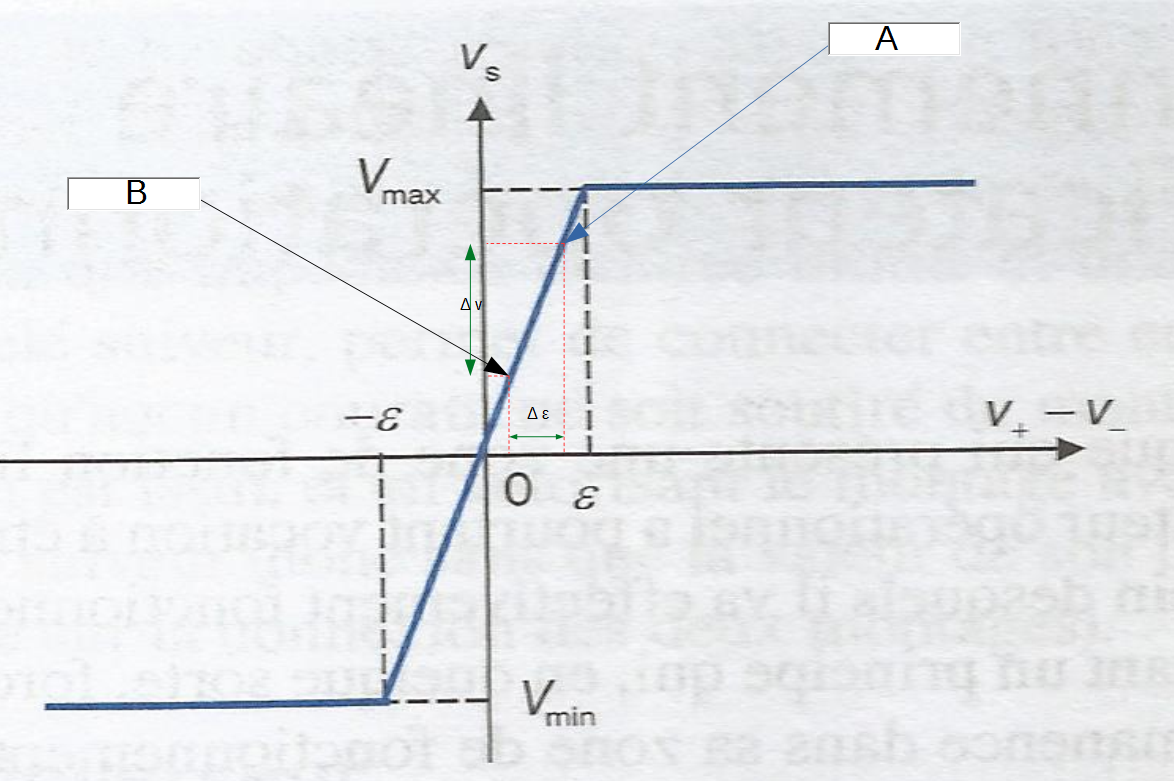
Pour faciliter la lecture, je remets ci-dessous le croquis illustrant la réponse de ce circuit :
Mettons que la tension de consigne passe maintenant à 2,5 volts, la tension de position restant à 2 ; l’ampli opé va relever une différence de 0,5 volts.
Supposons son gain β égal à 10 ; il va délivrer en sortie une tension de 5 volts ; cette tension va attaquer le circuit de puissance, par exemple la base ou la grille d’un transistor de puissance (classique ou à effet de champ) qui va délivrer, via le circuit électrique général du véhicule, les 14 volts et l’intensité nécessaires au moteur actuateur.
C’est ce principe que nous montrait la vidéo de notre ami belge.
Sous l’action du moteur, la pièce se déplace, la tension du capteur de position passe à son tour à 2,5 volts, l’ampli opé, constatant que ses entrées ont atteint le même niveau de tension repasse sa sortie à 0. Le circuit de puissance étant désactivé, le moteur s’arrête faute d’alimentation en énergie et le système trouve un équilibre stable.
Pour autant, les tensions de consigne et de position existent toujours (2,5 volts) mais leur différence étant nulle, rien ne se passe au niveau du circuit de puissance et de l’actuateur.
Le turbo, dépourvu de ressort de rappel, fonctionne ainsi. La valve d’EGR, en revanche, fonctionne différemment.
Munie d’un ressort de rappel, elle tend à se refermer en permanence ; le moteur d’actuation doit par conséquent générer continuellement une force s’opposant à celle exercée par le ressort afin que la soupape puisse s’ouvrir d’une valeur déterminée, qui dépend des conditions de fonctionnement du moteur.
À chaque instant, ces deux forces sont en équilibre ; la soupape fait donc l’objet d’oscillations permanentes dont l’axe de symétrie est la position théorique qu’elle doit occuper.
On tire de ces éléments plusieurs conclusions :
1°) l’ampli opé étant sensibles aux différences de tensions, la qualité de la tension de consigne doit évidemment être irréprochable ; en d’autres termes, si cette tension était composée, comme on l’a vu plus haut, de « marches d’escalier », cela aurait un effet négatif sur l’atteinte — et la stabilisation — du point d’équilibre de la soupape. On peut donc penser que la fréquence de base délivré par le µ-contrôleur, qui sert à composer ce qui deviendra le signal analogique de consigne, doit être largement supérieure à l’inertie des pièces (soupape + moteur). En admettant que cette fréquence soit effectivement de 1 kHz, on imagine mal la soupape changer de sens 2 000 fois par seconde…
2°) le maintien de la soupape à sa position de consigne nécessite continuellement des corrections de sa position : sous l’action du ressort qui tend à la refermer en permanence, elle effectue des déplacements. Lesquels sont identifiés immédiatement par l’ampli opé car une différence de tension entre la consigne et la position tend à apparaître. Le moteur est donc alimenté un bref instant pour replacer la soupape à sa position de consigne et le cycle recommence ;
3°) la mesure de la position exacte de la soupape est complexe. Même en utilisant un transducteur (potentiomètre à plusieurs voies) la variation de la tension du signal représentant la levée de soupape restera faible au regard de la course (environ 15 mm). Augmenter le gain de l’ampli opé est une solution, mais elle présente l’inconvénient de favoriser les oscillations de la soupape autour de sa position de consigne, la courbe de réponse de l’ampli étant alors très raide. J’imagine donc, indépendamment la réduction de l’effort du moteur électrique, que c’est la justification principale du recours à un train d’engrenages qui, en démultipliant le mouvement comme le ferait une montre, permet d’améliorer considérablement la précision sans pour autant introduire d’oscillations parasites. Cela dit, je pense que le gain de l’ampli opé est également assez élevé, mais seule l’étude du schéma électronique permettrait de le vérifier ;
4°) le fait d’avoir à contrer en permanence l’action du ressort fait continuellement travailler le moteur, et plutôt en régime dit de « couple bloqué ». Ce régime (peu ou pas de rotation mais un courant permanent plus ou moins intense traverse le collecteur et les enroulements) est très pénalisant pour la tenue du collecteur et des charbons. La conséquence probable est une réduction de la réactivité du moteur au fur et à mesure que le collecteur charbonne : au fil du temps, l’intensité du courant provoquant un mouvement donné va devoir croître ;
5°) les conditions de service de l’EGR sont très contraignantes (températures élevées, vibrations, fuites de gaz d’échappement, dépôts de suie, corrosion). Il est quasiment certain que le coefficient de glissement de la soupape dans son guide augmente de manière plus ou moins sensible au fil du temps ; il est tout aussi certain que c’est là la source principale de dysfonctionnement du dispositif.
Imaginons par exemple que la tension de consigne s’élève très faiblement (cas certainement très fréquent en régime intermédiaire avec une faible charge du moteur, ces conditions de fonctionnement ne nécessitant que de très faibles ajustements de l’ouverture de la vanne). L’ampli opé, constatant l’apparition d’une légère différence entre les tensions de consigne et de position, va donner l’ordre à l’étage de puissance d’augmenter l’intensité traversant le moteur. La soupape ne coulissant plus normalement, l’effort du moteur ne va pas pouvoir la mettre en mouvement comme cela aurait été le cas avec une soupape fonctionnant normalement. L’ampli opé, constatant que la différence des tensions continue à croître, va ordonner une augmentation encore plus nette de l’intensité alimentant le moteur. À un moment, la soupape va finir par se décoincer — c’est la définition même d’un effort de décollement — mais, cette fois, son déplacement va être relativement important vu l’énergie, en particulier magnétique, que le moteur a emmagasinée avant de parvenir à se mettre en mouvement.
Constatant que la tension a changé de sens (à cause de ce déplacement excessif, au lieu d’être parallèles, les courbes de consigne et de position vont se croiser) l’ampli opé va couper net l’excitation du moteur. Du coup, sous l’effet du ressort libéré de la contre-réaction du moteur, la soupape repart dans l’autre sens et va ensuite osciller selon une période qui dépend de l’inertie des pièces (soupape + moteur + engrenages) mais dont l’amplitude n’est sans doute pas négligeable dans ce cas particulièrement critique. Comme on l’a supposé au début de ce sujet, ces oscillations ont certainement un impact significatif sur la qualité de l’air alimentant le moteur.
En d’autres termes, les saccades trouvent certainement leur origine dans cette pulsation que l’électronique, malgré sa vitesse de réaction, ne parvient pas à maîtriser.
On peut imaginer un algorithme de correction qui tendrait, en l’anticipant, à limiter la contre-réaction du moteur en cas de début de grippage. Mais ce dernier devrait alors interagir avec les autres ; très compliqué à résoudre comme problème et, donc, coûteux…
Une dernière question peut être posée : comment détecter l’anomalie et la corriger ?
À la condition que l’outil de diag embarqué fournisse le RCO et la position effective de la soupape, la vérification du fonctionnement correct de l’EGR peut s’avérer assez simple. Si le fonctionnement de la vanne est correct, le RCO et la tension appliquée au moteur sont représentées par deux courbes décalées dans le temps de quelques dizaines de microsecondes, ce décalage représentant le temps de réaction du système. Formulé autrement, le RCO représente l’effort que le moteur applique sur le ressort de la soupape d’EGR afin de lui faire occuper la position déterminée par l’ECU.
Un ressort se caractérisant par sa raideur, qui est constante tant qu’on le fait travailler dans le domaine élastique — ce qui est la règle, évidemment — le rapport entre l’effort exercé par le moteur et la position occupée par l’organe est invariable. Autrement dit, le RCO et la position de la soupape sont reliés par un terme constant.
En divisant la valeur numérique de l’un par la valeur numérique de l’autre, on obtient le rapport recherché. Et toute variation de ce rapport traduit un dysfonctionnement du système, lié à un coulissement erratique de la queue de soupape dans son guide, voire à un début de grippage.
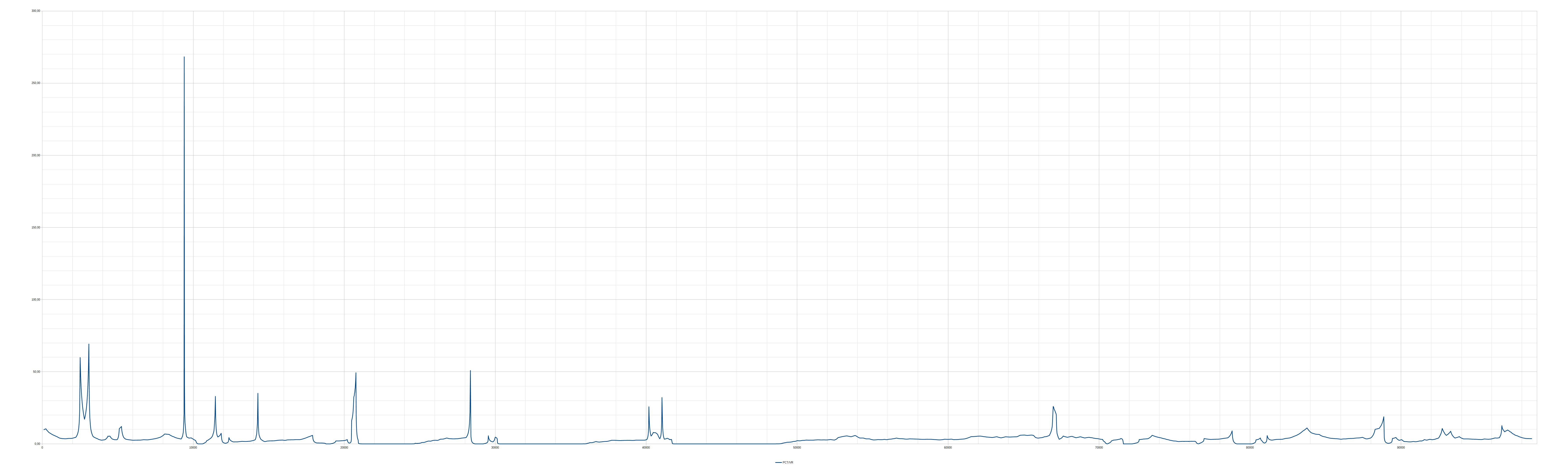
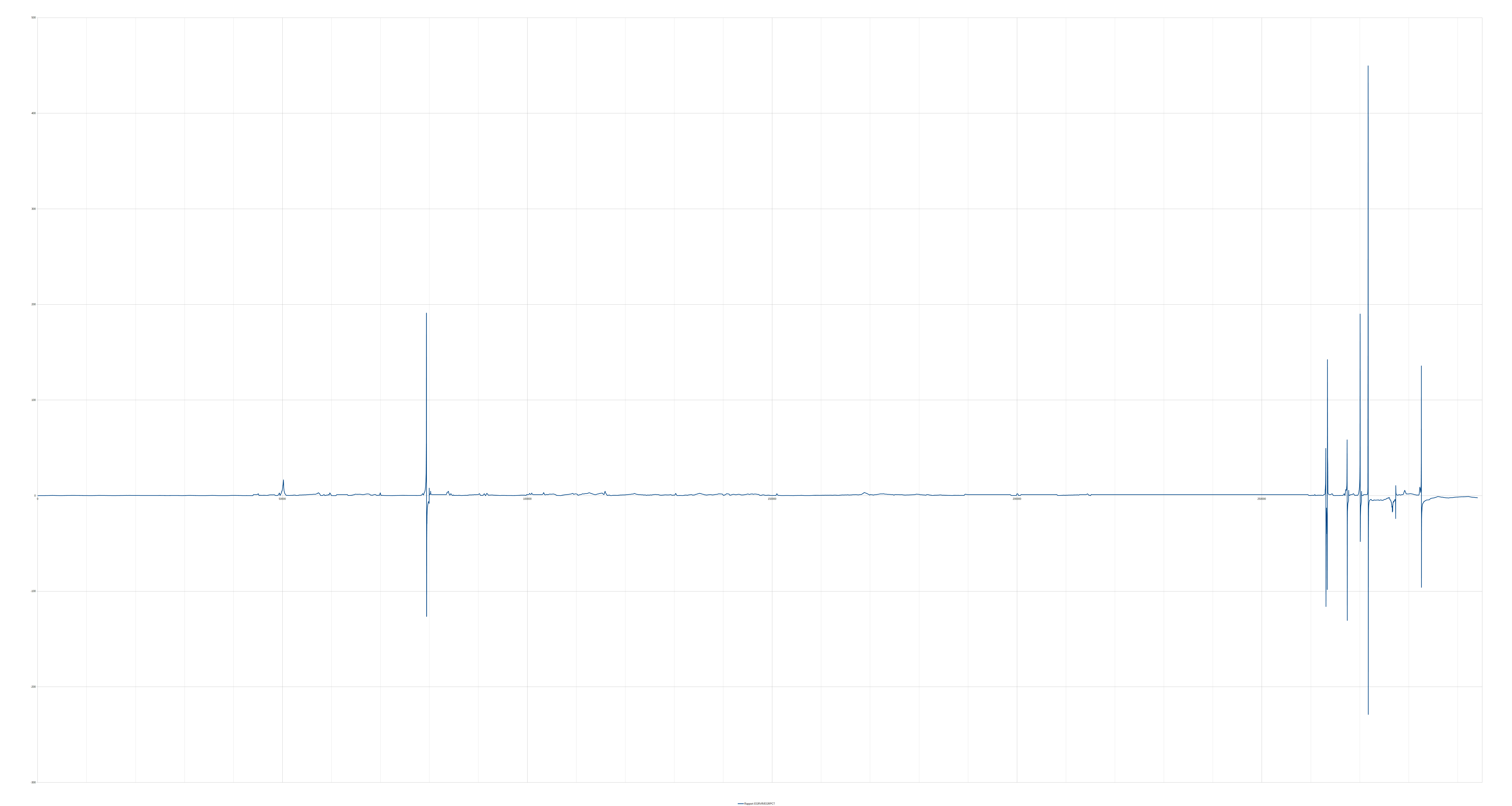
Ne sachant pas exactement ce que désignent les grandeurs EGRVR et EGRPCT (l’un est défini comme étant le rapport cyclique et l’autre comme « l’EGR commandé ») j’ai supposé que ces deux termes représentaient les deux variables requises par la manip.
La division de l’un par l’autre traduite par le graphe révèle la présence d’un certain nombre de pics, notamment en début d’enregistrement ; aux réserves que je viens de formuler quant à la signification réelle du second terme près, cette piste mérite bel et bien d’être creusée.
Voici le graphique :
Concernant le banc de test de la vanne EGR, rien ne dit qu’il faille se lancer dans un montage électronique sophistiqué ; avec une batterie en bon état, un simple rhéostat (résistance variable) permettant d’ajuster très finement la tension aux bornes du moteur, un ampèremètre mesurant l’intensité qui le parcourt et un comparateur palpant la tête de soupape afin d’en mesurer la levée et il devient possible de vérifier de manière très précise le fonctionnement de l’organe, notamment le coulissement homogène et sans points durs de la tige de soupape dans son guide.
Et si on a la chance de posséder une pièce neuve, le tracé de la courbe de réponse théorique devient extrêmement simple.
En résumé, il me semble que les dispositifs de gestion électronique des moteurs actuels ouvrent aux amateurs éclairés un espace de liberté et d’expérimentation sans limites. Une chose est sûre néanmoins : au vu de leur conception et de leur fonctionnement, l’entretien du turbo et de l’EGR doivent être particulièrement soignés si on veut éviter de coûteux et prématurés remplacements.
Voilà quelles étaient les considérations du jour !





 Bien au contraire!... (si tu veux t'en convaincre regarde la video de Demerliac que j'ai posté 3 ou 4 posts au-dessus...) explique bien ce que tu pensais et ce que je pensais aussi, sur le principe de base du PWM
Bien au contraire!... (si tu veux t'en convaincre regarde la video de Demerliac que j'ai posté 3 ou 4 posts au-dessus...) explique bien ce que tu pensais et ce que je pensais aussi, sur le principe de base du PWM