Je reviens sur ce thème, histoire de permettre à certains de finir leur tube d’aspirine…

La remarque de Bisnouk relative au très faible coût des circuits autorisant un asservissement sophistiqué d’un organe mécanique m’a donné l’envie de reconsidérer les hypothèses simplificatrices sur la gestion de la position de la soupape d’EGR que j’avais précédemment prises en compte.
L’idée n’est pas d’imposer à ceux qui suivent ces échanges des développements théoriques fastidieux qui n’ont pas leur place ici ; simplement, il me semble que l’utilisation d’algorithmes plus ou moins sophistiqués — lorsqu’on voit les stratégies mises en œuvre pour charger une pauvre batterie, on peut effectivement s’attendre à tout — a inévitablement des conséquences sur la détection des anomalies de fonctionnement ainsi que sur les méthodes à mettre en œuvre pour vérifier que la soupape d’EGR — mais c’est certainement tout aussi vrai pour le turbo — fonctionne correctement.
Dans mon propos précédent, j’avais supposé que la régulation proportionnelle exercée par un ampli opérationnel analogique pouvait suffire à gérer l’asservissement de la soupape.
S’il est fait appel à l’électronique numérique comme vous le pensez tous les deux, l’espace de liberté devient sans limites et c’est cette question qu’il m’a semblé intéressant d’examiner d’un peu plus près.
Que les circuits permettant de mettre en œuvre cette régulation soient situés sur la carte mère (ECU) ou sur l’organe lui-même devient une question secondaire, que la commande de puissance soit un signal électrique continu ou un signal modulé par le biais d’une modulation des largeurs d’impulsions aussi. De toutes façons, vu qu’aucun de nous trois ne dispose du véhicule pour en analyser les circuits de commande — et les signaux associés — clôt provisoirement le débat…
Venons-en au fait...

Le début de grippage en rotation ou en translation d’une pièce mécanique se caractérise par une augmentation transitoire de l’effort qu’il faut exercer pour provoquer son déplacement. C’est ce qu’on appelle communément un « point dur ».
Les conditions de service de l’EGR et du turbo étant très sévères, ces organes sont particulièrement exposés au grippage.
Pour un automaticien, il s’agit ni plus ni moins que de gérer un phénomène perturbateur (le grippage) et la question se résume à trouver une solution pour que le système retrouve le plus rapidement possible son équilibre lorsque la perturbation se produit.
Sauf à ce que les choses aient évolué, j’en étais resté à des principes de régulation fondés sur trois axes :
- la différence entre la position théorique que doit atteindre la pièce et sa position réelle ;
la manière dont évolue dans le temps l’erreur de position (évolution des erreurs en fonction du temps) ;
l’évolution de l’écart entre les positions à l’instant t et à l’instant t+1 occupées par l’organe à piloter (variation de la position de la pièce en fonction du temps).
L’ampli opé dont je parlais travaille sur la proportionnalité : plus la consigne et la position réelle sont éloignées l’une de l’autre, plus il envoie de puissance au moteur de commande pour les rapprocher.
Si on prend l’exemple d’un régulateur de vitesse, plus la vitesse instantanée du véhicule est éloignée de la vitesse à atteindre, plus il va falloir accélérer et cette accélération sera donc proportionnelle à l’écart des vitesses.
Concernant les deux autres paramètres, les choses sont un peu plus fines à cerner. Pour illustrer, je vais faire appel à différents exemples.
L’évolution de l’erreur de position est par exemple bien adaptée au suivi de la précision d’une bande transporteuse ou d’une trémie doseuse ; même si la position instantanée oscille autour de la valeur théorique, dans la mesure où, au final, on mélange tous les matériaux, on retrouvera la moyenne des valeurs — et donc le dosage théorique — dans le béton ou l’enrobé bitumineux fabriqué.
L’important est que le dosage moyen ne dérive pas. Pour ce faire, on va calculer à chaque instant les surfaces délimitées par les courbes mathématiques représentant la consigne et le poids de matériaux pesés en fonction du temps et on va veiller à ce que cette surface ne dépasse jamais une certaine valeur.
En d’autres termes, on va faire appel au calcul intégral.
Pour rassurer ceux que l’analyse mathématique fait flipper, il suffit de garder à l’esprit que lorsqu’on calcule la surface d’une géométrie quelconque (triangle, carré, rectangle, cercle, etc.) on fait ni plus ni moins du calcul intégral…
L’évolution de l’écart entre consigne et position réelle va être très importante pour l’asservissement d’une table de finisseur (ces engins chenillés qui « tirent » les tapis bitumineux sur les routes). Si la table commence à monter ou à descendre, même imperceptiblement, cela veut dire qu’on amorce une onde. Et qui dit onde, dit défaut d’uni. Et qui dit défaut d’uni, dit oscillations dans les véhicules. Et qui dit oscillations dit inconfort.
L’important est donc que si l’angle de la table commence à varier, on rectifie immédiatement le tir afin que l’amplitude de l’onde qui commence à naître reste extrêmement réduite. Pour situer les idées, une amplitude de 7 à 8 mm sur une longueur d’onde d’une dizaine de mètres est très pénalisante pour le confort des véhicules légers.
L’important n’est pas que l’épaisseur varie de quelques millimètres par rapport à la consigne, car la moyenne sera toujours dans les clous. L’important est que cette variation, qui ne peut pas être totalement maîtrisée en raison même du flottement de la table sur le matériau enrobé, soit la plus réduite possible.
Au plan mathématique, on effectue la dérivée de la courbe mathématique qui donne la position de l’organe en fonction du temps.
Là encore, pour éviter tout stress aux non matheux, la dérivée de la courbe représentant une rampe (une côte dans le langage commun) est une notion assez simple à cerner : plus le nombre qui représente cette dérivée est grand, plus il va falloir tomber vite les rapports de boîte (ou de dérailleur si vous êtes cycliste

).
Formulé autrement, la dérivée représente la variation de l’angle de rampe en fonction du temps ou de la distance parcourue : le « coup de cul final » d’une côte correspond donc à l’accroissement brutal de la valeur de sa dérivée.
Ce que je viens de décrire, c’est la régulation PID (proportionnelle, intégrale, dérivée).
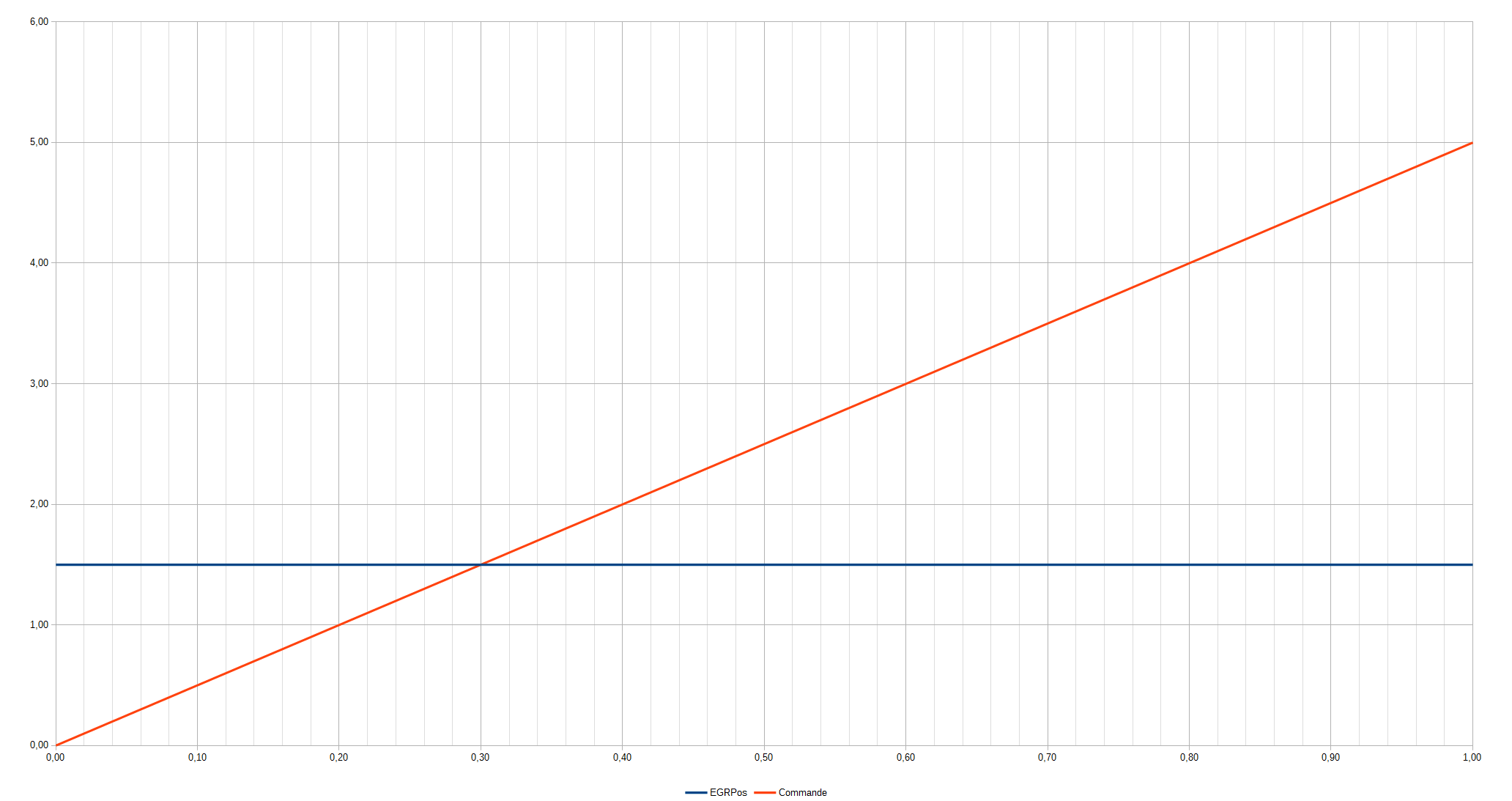
Si on transpose ces éléments à la gestion de notre soupape de recirculation des gaz d’échappement que l’on va supposer être victime d’un début de grippage, la modélisation de l’état initial aboutit à ceci :
la courbe bleue correspond à la tension délivrée par le capteur de position de la soupape. Admettons qu’elle soit de 0 volts lorsque la soupape est fermée et de 5 volts lorsqu’elle est totalement ouverte. Avec une tension de 1,5 volts, la soupape est donc ouverte à 30 %. Supposons la grippée dans cette position : la tension n’évolue donc pas en fonction du temps ;
la courbe rouge correspond au signal de commande. Pour simplifier, on supposera que la consigne varie de manière linéaire en fonction du temps. Ce n’est pas le cas en réalité (la valeur de la consigne est déterminée par l’ECU en fonction des paramètres caractérisant l’état du moteur, donc sa variation est beaucoup plus complexe) mais cela ne change rien au raisonnement.
On note que les tensions en jeu sont relativement faibles ; elles proviennent des circuits électroniques, qui utilisent des tensions de l’ordre de 5 volts.
La question est de savoir comment le système de régulation va répondre ; les énergies en jeu étant cette fois significativement plus élevées, les tensions vont l’être aussi. En d’autres termes, on va s’appuyer sur le circuit électrique du véhicule, dont la tension nominale est d’environ 14 volts, l’intensité mobilisable étant de plusieurs dizaines d’ampères.
Si on reprend le système de régulation proportionnel faisant appel à un ampli opé dont on fixera le gain à 7 pour l’exemple, on obtient la fonction de transfert suivante :
L’axe des ordonnées (l’axe vertical) représente donc les tensions, celui des abscisses (horizontal) le temps. Admettons que la période d’étude s’étende sur une seconde.
On voit que l’écart de tension entre la consigne et la position de la soupape varie linéairement en fonction du temps et que la réponse de l’ampli est 7 fois plus élevée en tension, mais toujours linéaire, sauf que parvenue au niveau de la tension générale, soit 14 volts, elle se stabilise.
Si on suppose maintenant que la régulation fait appel à l’électronique numérique, cela veut dire qu’on peut imaginer n’importe quel type de réponse.
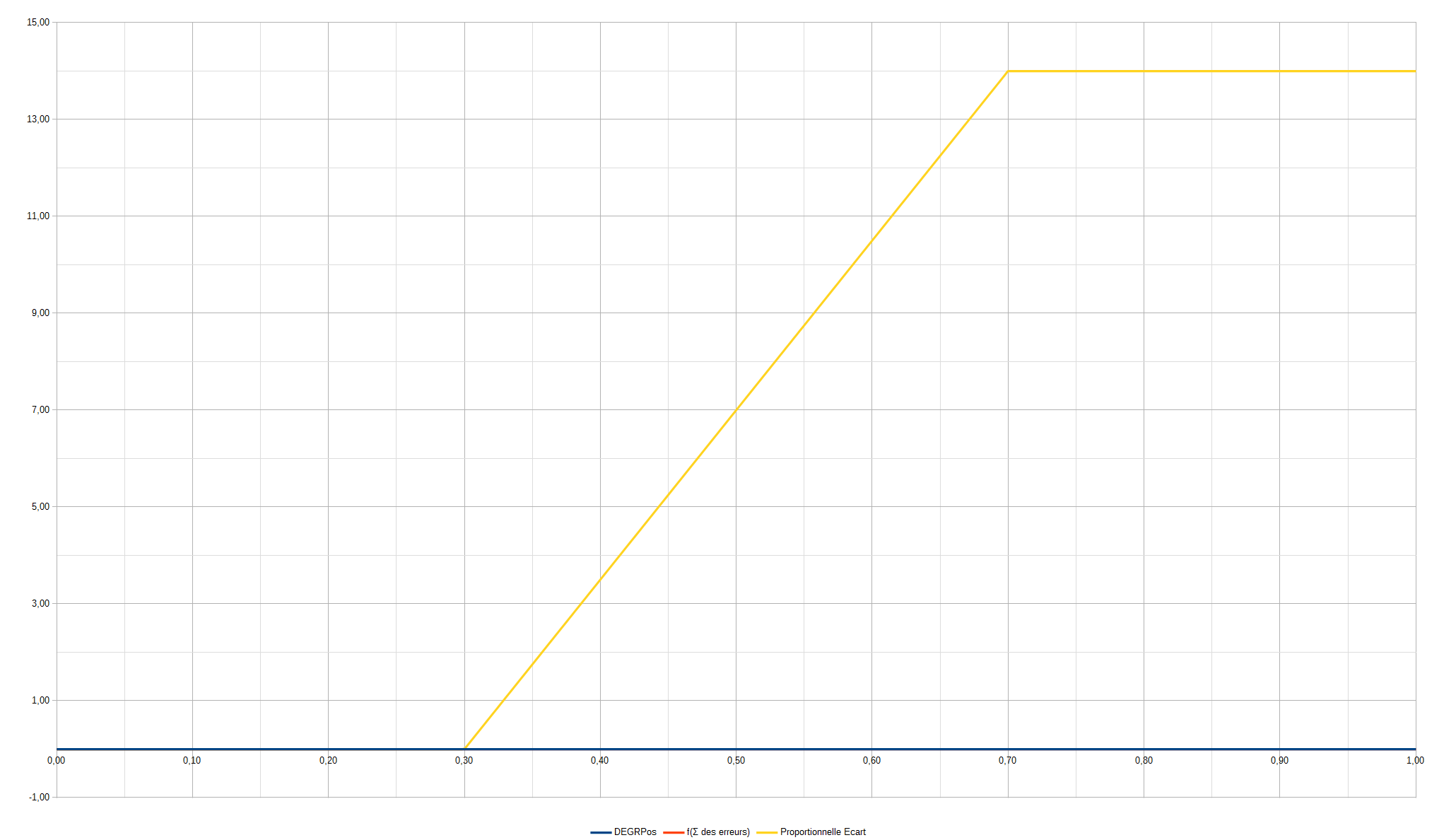
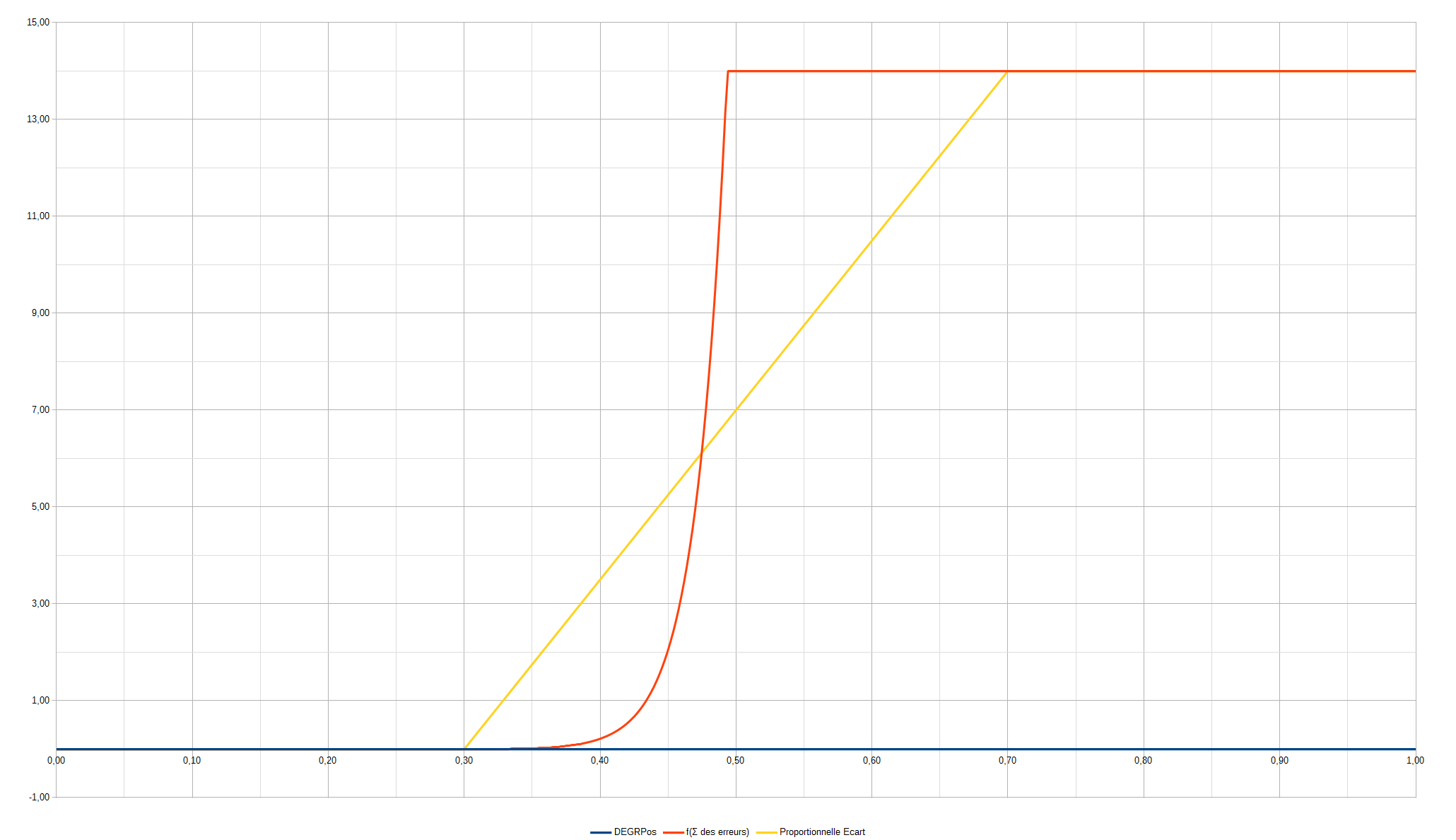
Admettons qu’on fasse appel à une régulation PID assez paisible :
En bleu, la soupape ne bougeant pas, la dérivée de sa position est nulle.
La courbe jaune correspond toujours à la régulation proportionnelle, mais dont le gain est réduit d'une bonne moitié.
La courbe rouge représente l’évolution de la surface délimitée par les courbes bleue et rouge du tout premier graphe. Elle représente donc une réponse possible de régulation par les intégrales. On constate cette fois que la réponse est assez calme si la dérive reste modérée mais qu’elle s’intensifie lorsque la dérive augmente.
Pour comprendre ce mécanisme, faisons une courte analogie avec l’accélération donnée à un véhicule : on accélère fort au début (régulation proportionnelle) puis, lorsqu’on s’approche de la vitesse de consigne, on soulage l’accélération (régulation par les intégrales). Et quand on a atteint la bonne vitesse, on ne laisse plus dériver (régulation par les dérivées).
Dans le cas qui nous intéresse, la dérivée ne servirait pas à grand-chose, même si la soupape fonctionnait normalement : la consigne varie sans arrêt, il faut donc la suivre au plus près, pas la stabiliser à une valeur précise.
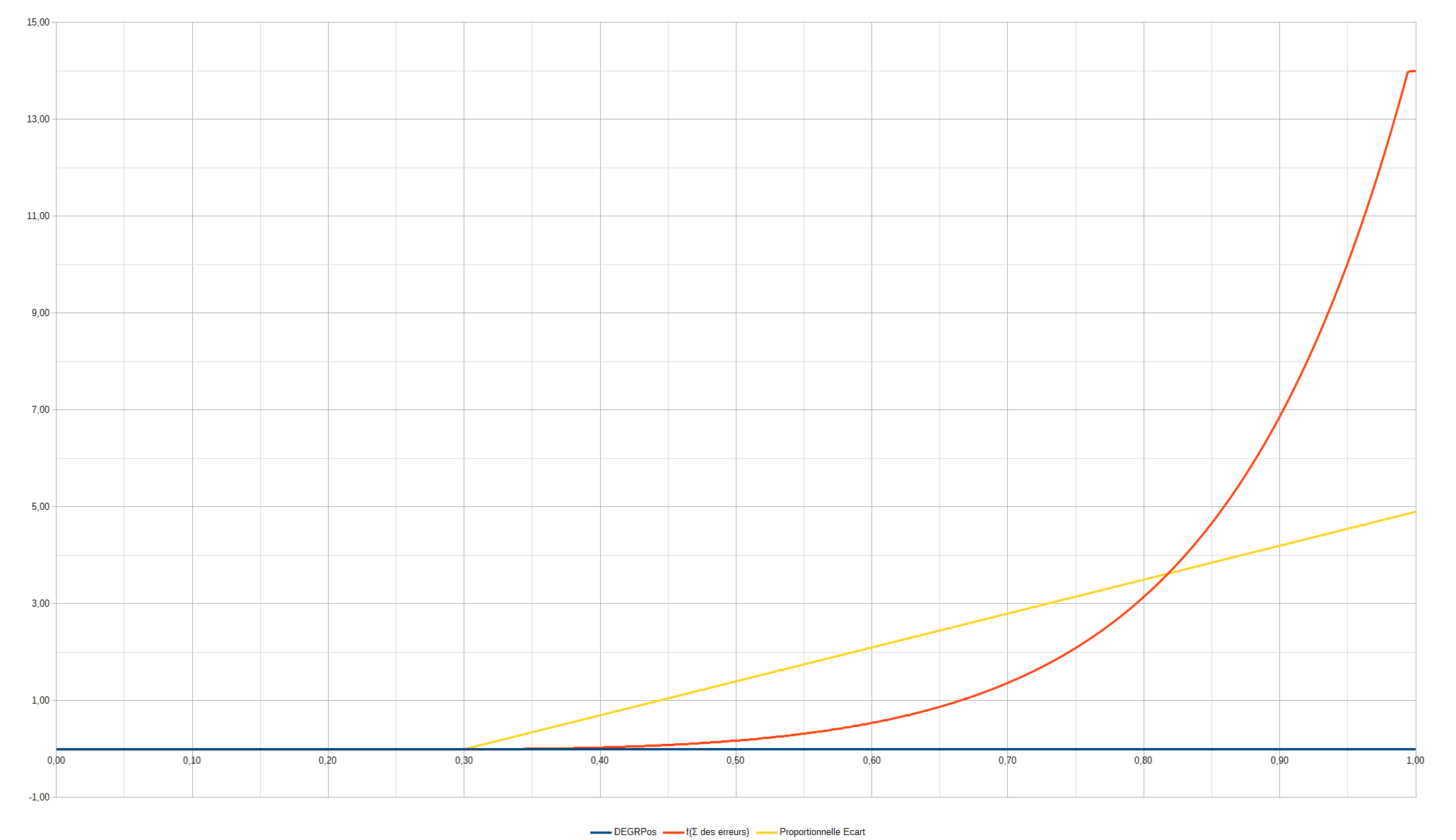
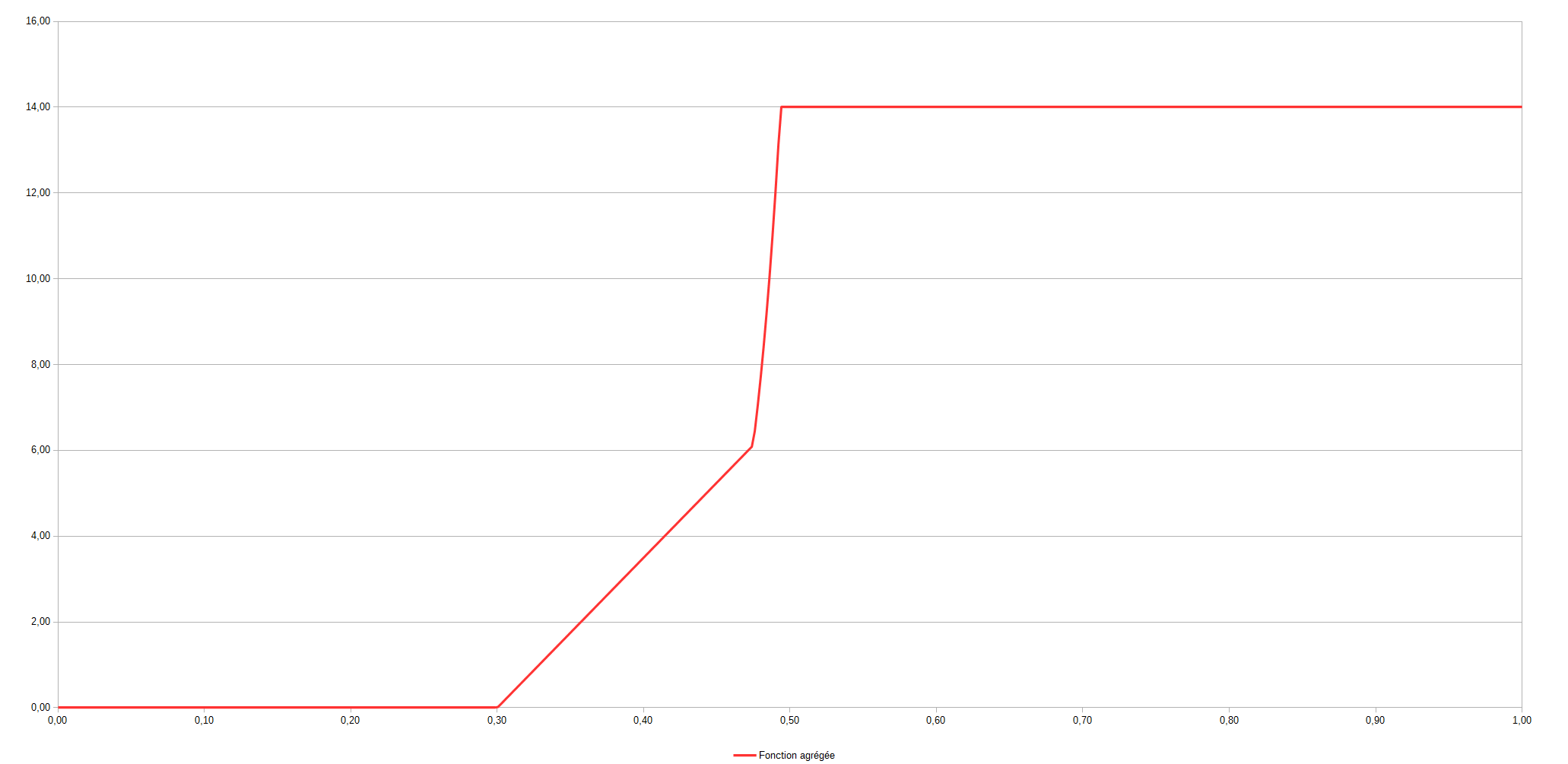
En agrégeant les deux courbes significatives, on obtient la fonction de transfert suivante :
Remarque : la soupape étant rappelée par son ressort et non par le moteur d’asservissement, les tensions sont systématiquement positives. C’est évidemment différent pour le turbo qui est piloté par son moteur, dans le sens « aller » comme dans le sens « retour ».
On peut adopter une fonction de transfert beaucoup plus agressive, pour accélérer la réponse de la soupape, mais aussi pour la « secouer » si elle manifeste un début de grippage.
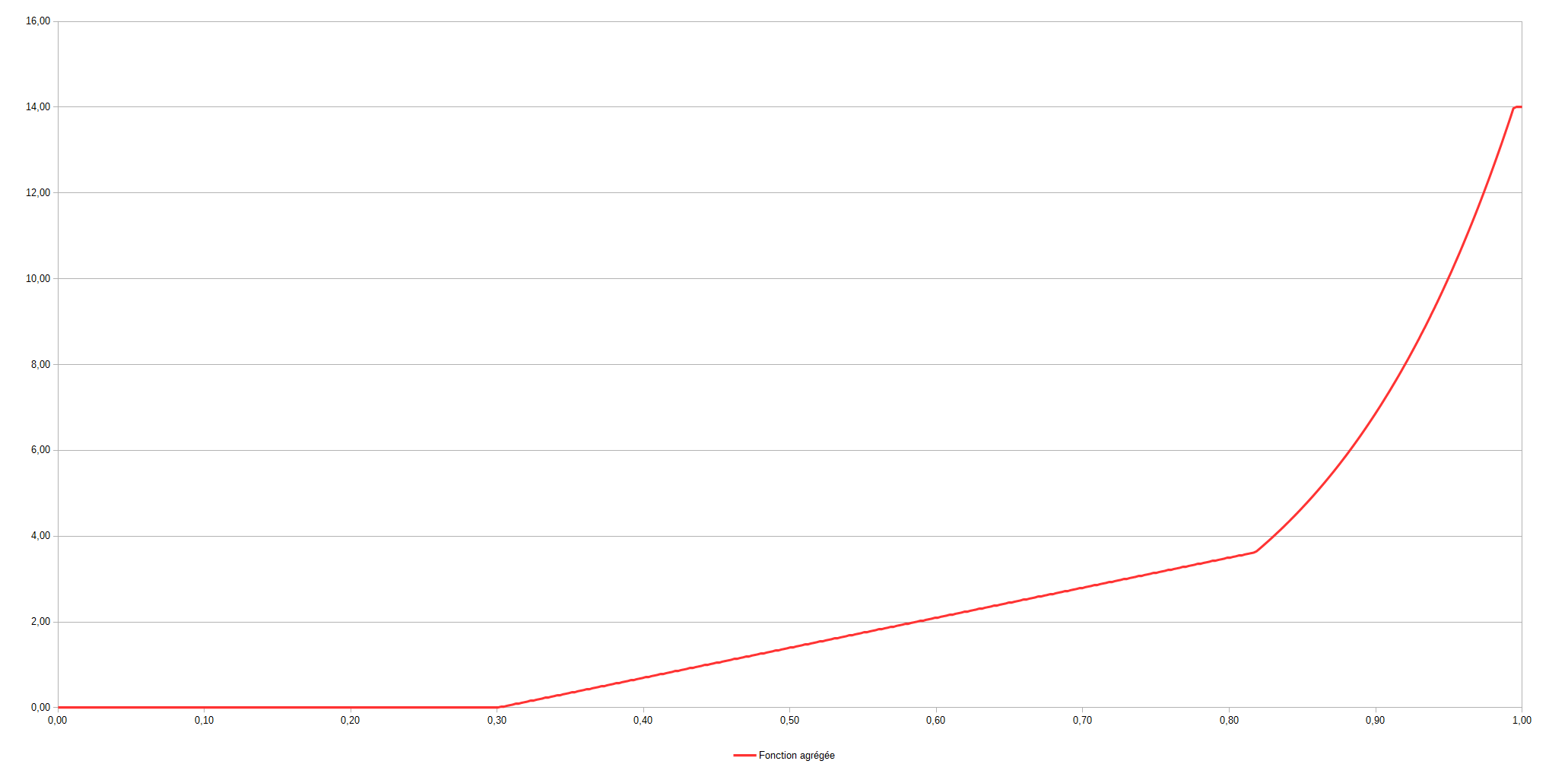
On pourrait par exemple adopter une courbe comme celle-ci, beaucoup plus méchante :
on a gardé une réponse proportionnelle dont le gain est de 7 et « raidi » la régulation par les intégrales. Alors que dans le cas précédent la puissance maximale était envoyée au bout de 7 dixièmes de secondes, là, en deux dixièmes seulement, le moteur d’actuation crachera ses watts plein pot…
Cette cuisine mathématique traduit une hypothèse, arbitraire certes, mais plausible : si la soupape ne s’est pas débloquée au bout d’un laps de temps que les ingénieurs de Pierburg, Bosch ou Dieu sait qui d’autre, ont dû définir avec un soin tout particulier, elle se prend un sacré coup de cravache de la part du système de commande…
Le coup de cravache en question s’intensifie vraiment à l’instant précis à partir duquel la courbe rouge passe au-dessus de la courbe jaune : la puissance délivrée par l’électronique en fonction du temps passe en effet du régime linéaire au régime exponentiel.
En agrégeant de nouveau les courbes, on obtient ceci :
En fait, il suffit de quelques heures au banc pour préciser les choses et de quelques minutes pour gratter les dix lignes de programme correspondantes.
C’est précisément la vertu principale de l’électronique que de manier toutes sortes de courbes mathématiques issues d’équations plus ou moins complexes. Ici, je n’ai fait que mettre un phénomène physique simple en équation (un grippage) et formuler diverses hypothèses quant aux réponses possibles.
Au final, tout cela se résume à une question de gestion d’énergie. C’est en particulier le cas pour l’ouverture des injecteurs : leur commande se fait via une tension (et donc une intensité) dont la courbe mathématique représentative est quasiment verticale (actionnement en front montant). La courbe de réponse d’une injection mécanique est loin d’être verticale : le volume de gas oil résiduel dans les tuyauteries et l’élasticité de la dite tuyauterie s’y opposent obstinément
.
L’électronique permet cette gestion très particulière de l’énergie, c’est d’ailleurs le rôle des gros condensateurs que l’on aperçoit sur la photo mise en ligne par Volta sur le sujet de la réparation de la carte du Td5 : ils libèrent en quelques microsecondes dans les injecteurs l’énergie qu’ils ont accumulée pendant les millisecondes précédentes…
Effet garanti !

Pour en revenir à notre EGR — et ce point est capital — un tel système va parvenir à garder sous contrôle un organe même quand il commence à débloquer sérieusement, sans oublier les allers et retours que l’électronique impose à la soupape au démarrage et à l’arrêt du moteur et qui servent à retarder le grippage.
Si on pousse le raisonnement encore plus loin, on peut facilement imaginer qu’une soupape en bon état n’aura pas besoin d’une tension élevée pour prendre sa place et obéir à la consigne. Là encore, j’imagine que les industriels concernés ont dû, au fil du temps, définir un compromis. Supposons qu’une tension de commande de 8 volts soit suffisante pour ouvrir en grand et à la vitesse prévue une soupape en parfait état : le problème est alors de déterminer le niveau de tension à partir duquel on considère que la soupape commence vraiment à débloquer.
Admettons que le niveau de tension choisi soit de 11 volts ; il suffit alors d’écrire le code qui va bien dans le programme du microcontrôleur pour qu’un code erreur s’inscrive dans les mémoires de l’ECU si cette tension est dépassée…
Les essais au bancs initiaux sont probablement complétés par les retours d’expérience et le jeu consiste à trouver un équilibre entre les différents paramètres contradictoires, l’objectif étant de s’inscrire dans les stratégies technico-économiques du moment : zéro entretien pendant une période la plus longue possible…
Mais lorsqu’on est arrivé au bout, car il y a toujours une fin à l’histoire, l’organe est bien rincé et, donc, il ne reste plus qu’à le remplacer. En l’espèce, on peut supposer qu’avec les pointes d’intensité, le collecteur du moteur a fini par se brûler (si ce n’est le bobinage moteur lui-même) les engrenages se fatiguer et le potentiomètre charbonner.
Alors qu’un entretien préventif aurait sans doute suffi à préserver cette belle horlogerie.
Mais cet entretien préventif, personne ne le fait, parce que l’électronique fait peur et que personne, parmi les tontons cambouis d’hier, n’ose y mettre les mains, se contentant de croiser les doigts en attendant la suite, qui finit par arriver vers 100 000 km — voire un peu avant — si j’ai bien compris.
Les autres, c’est-à-dire la majorité, se résignent à la totale (remplacement du turbo, de l’EGR etc.) ou préfèrent changer de véhicule avant que les choses ne se compliquent vraiment : bienvenue à l’ère des changeurs de pièces et de la location longue durée…

Tous ces choix, effectués dans l’opacité la plus totale et au motif qu'aujourd'hui, il n'y plus de temps à perdre dans l'immobilisation du véhicule (payer n'est guère chronophage

) ont évidemment des conséquences sur les modes opératoires dédiés à la détection des anomalies. On s’en rend assez vite compte à partir de l’analyse des informations délivrées par l’outil de diagnostic embarqué :
- le fait que le signal de commande délivré par l’ECU soit décorrélé de manière plus ou moins nette des autres paramètres d’état du moteur ne signifie pas nécessairement que la soupape de RGE soit rincée ou plus précisément qu’elle ne réponde plus correctement aux ordres du calculateur principal ; ce peut être juste le signe qu’elle commence à fatiguer, ce dont l’électronique va s’accommoder — jusqu’à un certain point évidemment — en la brutalisant de plus en plus afin qu’elle reste dans les clous. Mais en l’absence de code erreur et surtout sans état de référence digne de ce nom (état correspondant au comportement d’une soupape non grippée) il est impossible de statuer catégoriquement, il suffit de se reporter à nos errements du début de ce sujet pour s'en convaincre. Quant à l'identification d'un défaut mineur (les fameuses saccades) elle relève de la gageure ;
le fait de brutaliser la soupape va accroître significativement le risque d'instabilité ; en d'autres termes, elle ne va pas se placer correctement (glissements par à-coups liés à des micro-blocages qui se libèrent sous l'action de l'actuateur et se reproduisent dès que l'action de ce dernier se relâche et ainsi de suite) ce phénomène étant certainement à l'origine des saccades ;
pour conclure de manière incontestable, il faudrait étudier la corrélation entre le signal de position de la soupape et les autres paramètres d’état du moteur. Là encore, sans disposer de la carto du calculateur, c’est virtuellement impossible.
Seule certitude : l’apparition du code défaut. Ça nous fait une belle jambe car, d’une part, c’est trop tard, d’autre part, pas besoin d’un l’outil de diag pour ça!
La conclusion de l’affaire est assez embarrassante : le logiciel de diag embarqué ne permet pas de conclure de manière fiable, simple et rapide dans ce cas et le recours à l’outil de test de l’EGR agréé par Land Rover (dixit la doc
) est une petite gâterie à réserver aux gens pressés, j'ai nommé les techniciens du hi-tec, les rois de la valise, dont le précieux temps est facturé 90 roros HT de l’heure…
Dans les deux cas, je suis prêt à parier que ça se solde par le remplacement pur et simple de l'organe…
Mais cette conclusion me semble bien dans l’esprit de ce forum : nul besoin d’une panoplie d’outils sophistiqués pour suivre de près ces organes et les faire durer ; un peu de jugeote, un entretien préventif de bon sens qui tient en trois étapes, sachant que si un gentil membre heureux possesseur de ce type de véhicule pouvait se charger de la première, ce serait un pur bonheur !
- Étape 1 : mesure de la courbe de réponse d’une soupape neuve avant montage. Une batterie bien chargée, une résistance variable encaissant quelques dizaines de watts afin de faire très doucement varier la puissance, un ampèremètre pour mesurer l’intensité du courant excitant le moteur d’actuation, un voltmètre pour mesurer la tension délivrée par le capteur de position de la soupape et un tableur pour sortir un beau graphe sont nécessaires ;
Étape 2 : au fil du temps, mais sur véhicule cette fois, autrement dit sans déposer quoi que ce soit, mesure de la dérive selon le même protocole et avec les mêmes outils.
Étape 3 : détermination du seuil de déclenchement d’une bonne révision de l’organe : 30 %, 40 % de dérive, plus encore ? Là encore, l’expérience collective devrait permettre d’optimiser rapidement cette valeur.
Le raisonnement me semble théoriquement transposable au turbo, à un bémol près toutefois, la présence d’un module électronique dans cet organe pouvant rendre incontournable le recours à l’oscilloscope…
C’étaient, de nouveau, les considérations du jour
.
Volta a écrit :Autre chose, je n'avais jamais remarqué que tu étais dans le pays de caux!...

donc on est presque voisins... C'est sans doute le "1400" qui m'a fait penser que tu étais plutôt dans le Pays d'Auge....
Voisins nous sommes, en effet ! Selon les jours de la semaine, on est éloignés de 10 ou de 40 km !